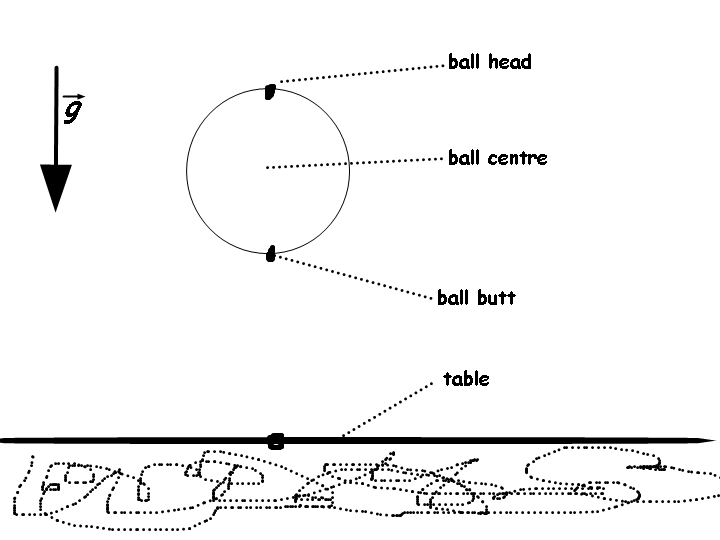
Kind figured, the metal rod just brushes right below the balls and don't do anything to stir them up
Having used both considerably now, I think I can make a solid comparison. Also, I think my level of play should be right around the target audience of an advanced robot.
IMO the service height thing is a non-issue. For topspins its very rare to have a ball below the middle ring position as it enters above the table. Only one common type of shot does that--a brush loop of a half-long ball. Despite being able to launch balls from that height the Amicus/Powerpong cannot actually simulate that ball correctly because it cannot generate the correct spin/speed ratio. It needs a spin level inbetween +5 and +6 to do so.
The main advantage of the Powerpong, and to a lesser extent the Amicus, over the Robopong is IMO the functionality of its software. You can program more complex drills by 1) adding variations to the landing spot of each individual programmed shot, 2) being able to combine combos into sequences. There are other minor advantages as well, such as allowing 10 balls in a combo as opposed to 7, can make each drill much shorter than 1 minute, having a remote control that can start/stop a drill more easily, etc.
The biggest advantage the Robopong has is the hardware. The balls are simply far more realistic in every single way. The speed/spin ratio is more realistic, it can generate far faster balls, the sidespin is much more realistic, and there's no unwanted sidespin so you can actually do multi-position drills. Until I actually see this mythical retrofit in action (
@plunder can you show a video of your robot shooting balls to the corners?), none of them can be fixed whereas software can and is being incrementally improved on the Robopong.
The of course, there's the price, but I don't need to tell you about that. I'm not very price sensitive, I just want the best robot. At my level and for my needs, at least, the Robopong is a superior product right now. The realism of the ball it generates simply cannot be replicated and is crucial for my training.
With that said, I cannot fully recommend it yet. Software CAN be improved, but will it? Perhaps I'm a bit jaded after the frustrating experience with my Amicus, where software updates in 2 years have resulted in no discernible improvement, not even fixing the simple issue of unable to save the drill name correctly, and actually broke the random order service function. Robopong has already updated their app to add a much requested function, but I need to see more to be convinced of their dedication to their product. I've emailed them about my suggestions for improvement, and as someone who was trained as an engineer once upon a time most of them do not seem to be difficult modifications. So I'm gonna wait and see if they will continue to improve their products.
They are a new company, and they've already got an excellent product. But I want to see them to do more, I want to see them to strive for perfection. They have a LOT of potential. If they keep working at it I can see a future of them combining their eagle-eye product with their robots to dynamically return balls to you, even adding in AI for analytics and designing training regimen, and/or adding cameras to connect with coaches for remote coaching. What level is their ambition?