you misunderstanding, i never talked about 1st ball production of the amipong from my own experience. Honestly, so far i haven't
trained 1st ball receive drills with the Omega. I am too busy training other bot drills for hours nonstop. There are plenty of yt vids showing/explaining how to setup the Omega (if not the Amicus) for 1st ball production, and they (incl. the Omega manual) explain that the "1 ring visible"-setting be the correct/optimal one. Sounds like that you've been operating your Amicus your whole life wrong, sh*t da happenz.
Oh you're travling rn? Oh i am on vacation myself rn. Always same same then. Whatever you throw at me, i'll throw back at ya.
Ah and ofc one could use the amipong on the higher-levelled settings (2 rings visible, 3 rings visible, etc) for 1st ball production. I was just repeating what the other authors told about the
perfect setting. Regarding 1st ball production, i am not too keen AT THE MOMENT on testing it on my Omega, since i've experienced that the amipong's side spin production is different from a human's side spin (humans vs amipong use a different component pair out of the triplet <x-axis y-axis z-axis> for the ball's
angular velocity vector), resulting in
side-kicking bounces; one should expect that a Pongbot produces more human-like side spin, okay. But what about the 1st ball bouncing
height?
So you're interested in 1st balls which land
short (=are slow) and have heavy
backspin? Sounds good to me. But lemme
add the requirement that the height during the entire flight path should be
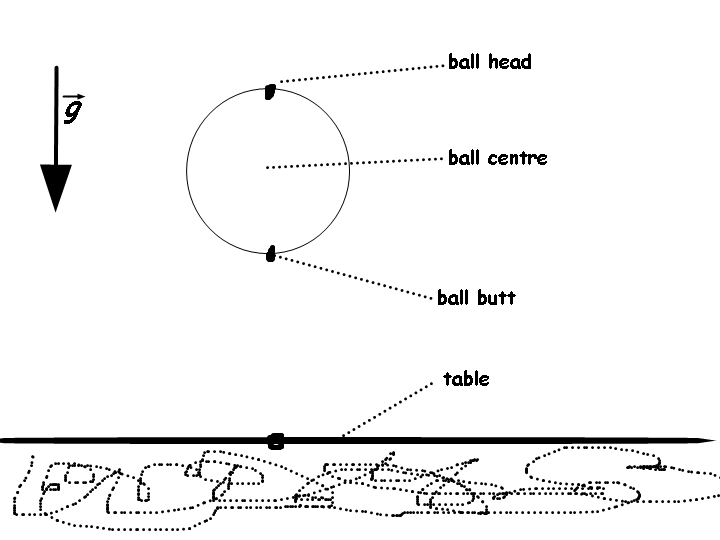
LOW, reaching its max height right above the net line. I suggested 1cm clearance as an arbitrary measurement. So let's be clear, detailed, and informative: the net height is
15.25cm. Then my requirement be: the '
butt' of the ball can never surpass
16.25cm during its entire 1st ball flight path, until the ball is hit by the bat/racket/paddle of the human.
Here for clarity's sake a quick pic of the nomenclature used:
In other words, it's pointless to have a short slow heavy backspin serve coming at me, which bounces up to
17.25cm (measured from table level to ball's butt).
High-bouncing balls are useless, even if they have much backspin and are short!
And to be clear (yet again), i never said or claimed that the amipong is or would be a great robot for 1st ball production. I do have higher hopes
for this task with the Pongbot, at least with regard to human-like side spin. But first let's hear the full details and then witness how well your bot does that!
My
own evaluation of the quality and capabilities of amipong's 1st ball production will be detailed in future, possibly in my amipong review thread. It will be an epic thread, discussing all details, possibilities and limitations.